The Balancing Act and the Science behind BallBot Control
In the ever-evolving world of robotics, the quest for autonomy and adaptability is reaching new heights. As machines increasingly navigate unpredictable and dynamic environments, maintaining balance becomes an essential capability.
Among the many innovations in the field, the BallBot—a robot balanced precariously on a single ball—stands out as a remarkable feat of engineering. Recent advancements by researchers at the Faculty of Mechanical Engineering, University of Danang – University of Science and Technology, have propelled the BallBot closer to becoming an indispensable partner in human-robot interactions.
Their findings, published in the International Journal of Mechanical System Dynamics, delve into the complexities of the BallBot’s dynamics, introducing cutting-edge solutions to enhance its stability and responsiveness.
A 360-Degree Marvel
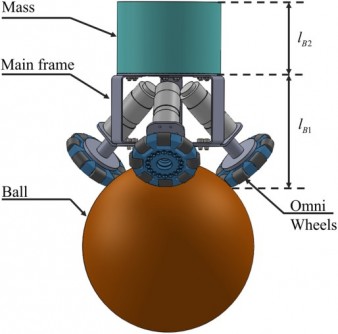
At first glance, the BallBot’s design seems almost magical—balancing atop a single ball while maintaining smooth manoeuvrability. Beneath the sleek exterior lies an intricate system of advanced engineering. The research team’s improvements include a four-wheel inverse mouse-ball drive system and a yaw drive mechanism, granting the robot an unparalleled ability to rotate 360 degrees on its vertical axis.
This enhanced manoeuvrability allows the BallBot to excel in tight or complex spaces where traditional wheeled robots falter. But there’s more—when stationary, a retractable tripod mechanism ensures stability, preventing unnecessary tumbles during rest periods. The innovative design isn’t just about aesthetics; it’s a masterclass in functionality tailored for dynamic human environments.
The Role of Trajectory Planning in Seamless Navigation
One of the most striking advancements in the BallBot is the integration of a trajectory planning algorithm. This system enables the robot to transition gracefully from rest to motion, following predetermined paths with precision.
In practice, this means the BallBot can move seamlessly across its environment without the jerky movements typical of less sophisticated robots. Whether navigating a cluttered warehouse or assisting in a high-stakes search-and-rescue mission, the BallBot’s ability to plot and execute smooth trajectories makes it a reliable ally.
Dr. Nhu Thanh Vo, the lead author of the study, explains: “Our work highlights the importance of fine-tuning parametric configurations to optimise the BallBot’s control performance. By adjusting these parameters, we can enhance the robot’s stability and manoeuvrability, which is key for creating more efficient and reliable robots that can assist in a variety of settings.”
Linear Quadratic Regulator (LQR) in Action
The cornerstone of this research is the implementation of a Linear Quadratic Regulator (LQR) controller—a sophisticated mathematical approach to optimising control performance. By leveraging the LQR model, the researchers fine-tuned the robot’s movement dynamics, achieving an optimal balance between agility and stability.
This advanced control mechanism ensures the BallBot remains steady even when faced with external disturbances or abrupt changes in direction. In essence, the LQR model gives the robot the ability to “think on its feet,” adapting to real-world challenges with remarkable precision.
From Lab to Real-World Applications
The implications of this research extend far beyond the confines of academia. Balancing robots like the BallBot hold immense potential across various industries, including:
- Manufacturing and Logistics: With their precision and stability, BallBots could revolutionise assembly lines, warehouse operations, and material handling, making processes faster and safer.
- Search-and-Rescue Operations: Equipped with the ability to navigate uneven terrains, these robots could become indispensable in disaster-stricken areas, reaching locations inaccessible to humans.
- Healthcare Assistance: Although not a focus of this study, the potential for BallBots to assist individuals with mobility challenges is worth noting.
By addressing the challenges of balance and control, this study lays a solid foundation for robots that can thrive in dynamic environments—whether it’s navigating a factory floor or providing critical support in emergencies.
Challenges and the Road Ahead
While the advancements are undeniably impressive, the researchers acknowledge that challenges remain. Fine-tuning parametric configurations is a complex task, requiring constant adaptation to new environments and tasks. Additionally, scaling these innovations for mass production could pose hurdles.
However, the trajectory of progress is clear. With each breakthrough, the dream of fully autonomous, adaptable robots becomes increasingly tangible. The BallBot, with its state-of-the-art design and control strategies, offers a glimpse into what the future of robotics could look like—seamless, stable, and highly interactive.
A Step Toward Smarter Robots
The BallBot’s story is one of relentless innovation and exploration. By pushing the boundaries of what’s possible in balancing robotics, the research team at the University of Danang has charted a course for more reliable, agile, and responsive machines.
The BallBot isn’t just a technical marvel; it’s a symbol of the potential for robots to become integral to human life, bridging the gap between artificial intelligence and real-world functionality. As the field continues to evolve, one thing is clear: balancing robots like the BallBot are poised to reshape the way we think about robotics and its role in our everyday lives.